Everyday objects can be animated to improve their functionalities and to provide a more interesting environment. Moreover, it is interesting to explore new interaction situations. Proper design of shape and interaction is needed to obtain interesting objects. Emotional expression is an interesting aspect to explore.
We have developed a couple of emotional trash bins, going around to invite to trash selected materials by using the lid movements and sounds, a coat-hanger (IGHOR), welcoming people entering and asking to have their coats, showing sadness if they keep it on, a naughty fan, coming close and suddenly investing the person with an air flow, a naughty money saver that has to be chased to give it money, a kind of pillow that react with sounds to the way it is touched.
Robots can be used as artistic media, able to perform and interact with people in artistic representations.
Interacting with a different entity: First contact
In order to explore the interaction possibilities, we are developing experiences where a person can interact with another entity, having different form and abilities, and should find strategies to communicate, possibly to perform shared tasks. The experiences are done both with robots and in virtual reality. More details on this post.
Robot actor
We have developed an autonomous robotic actor, able to participate to a public representation with a defined role and script, and we are developing an Improv robotic actor able to adapt its performance to external stimuli. We have firstly developed a robot able to move in classical scenes (e.g. the balcony scene of Romeo and Juliet) selecting the proper emotional expressions for the situation, and a framework to define emotional expressions according to the social setting among characters, and the situation. We then developed Robocchio, a robot able to implement a script and adapt to the timing of the partner on stage, tested on an adapted excerpt of Pinocchio by Collodi. We then improved Robocchio to improvise by visually recognizing 17 “scenic actions” and reacting to them with scenic actions influenced by one of 16 different psychological types. The final step to include improvised verbal interaction is under development.
Interactive robotic art
Robots can have different shapes and play different roles in interactive artistic performances. We are exploiting materials like nets, polyethilene sheets, polyurethane foams and other materials to obtain shapes interesting to move in interactive exhibits. Emotional expression is also in this area, an interesting feature to explore.
Concierge is a robotic head intended to stay on the side of an office door and following with the “eyes” the persons passing in the corridor. When a person comes to the door Concierge makes a “Yes” or “No” gesture according to the possibility to disturb the person in the office. Concierge can be dressed in different ways, corresponding to different psychological types, expressing the same behavior in different flavors. The more appreciated is the funky one.
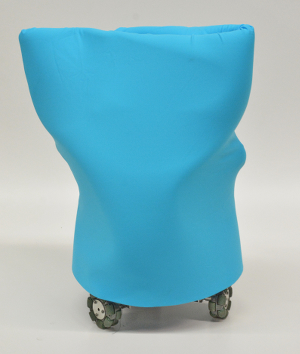
OIMI is built on an holonomic base (Triskarino), free to run on the ground, with infrared remote sensors, on which a kind of soft egg is fixed. The main body also includes tactile sensors that make it possible to detect whether OIMI is caressed, hugged, or hit. Under the base there is a circle of colored LEDs, and a loudspeaker to enable to emit sounds that express its emotional state. On the upper part of the body five touch sensible sections are used to communicate explicitly with the robot. On the front of the body an area enables the user to compose faces with given elements.
OIMI is built on an holonomic base (Triskarino), free to run on the ground, with infrared remote sensors, on which a kind of soft egg is fixed. The main body also includes tactile sensors that make it possible to detect whether OIMI is caressed, hugged, or hit. Under the base there is a circle of colored LEDs, and a loudspeaker to enable to emit sounds that express its emotional state. On the upper part of the body five touch sensible sections are used to communicate explicitly with the robot. On the front of the body an area enables the user to compose faces with given elements.
OIMI is intended to be used as an agent, other than the therapist, with whom children, especially those affected by Autistic Spectrum Disorder (ASD), can interact. We have implemented some autonomous reactions, mainly related to how it is manipulated and to the distance the user is. OIMI can also be driven by an operator or by programs running locally. OIMI has been implemented in 6 versions, the first three, with the name of Teo, within the Polisocial KROG project as a mobile element that interacts with a large screen and a Kinect system in play activities. The fourth version was provided as operational support for therapies and free play at the “Il Sogno” ONLUS Association, in Castenuovo Garfagnana (LU), where is operational since 2018. The fifth version is exploiting novel touch sensors and improved interaction capabilities. A sixth version is considering movement of the subject to drive the interaction. Other versions are under development, integrating sound direction and analysis, and goal directed actions (e.g. to improve attention while playing).