
An administration manual for this website is available at
https://docs.google.com/document/d/1YQHSmfYedhOWCBrFSKqS9xBvWZN1LW4-ZWMf5M9_5zc/edit?usp=sharing
POLIMI-ITW-S: A shopping mall dataset in-the-wild
This page introduces “POLIMI-ITW-S” dataset
“POLIMI-ITW-S” contains 37 action classes and 22,164 video samples with total . The average duration of each clip is about 7 seconds.
The dataset contains RGB videos, 2-D skeletal data, bounding boxes and labels for each sample.
This dataset was taken from RGB cameras of two smartphones by two recorders with resolution 1920×1080 pixels, 30 fps, held by hands about 90 cm from the floor.
The 2-D skeletal data and person bounding boxes are generated by the OpenPifPaf.
The 2-D skeletal data contains the 2-D coordinates of 17 body joints at each frame.
The recorders imitated the mobile robot, keeping moving or staying till by looking around to capture the persons who are performing the actions. We did not mount the camera on a robot in order to avoid uncommon situations that the presence of a robot could trigger.
1. Action Classes
As shown in the tables below, the actions in the dataset are distributed on three levels:
• General Level: labels are used for single action.
• Modifier Level: labels are used for actions of multiple persons.
• Aggregate Level detailed labels aim at describing multiple actions in a single label.
1.1 General Level Actions (10)
| A1: cleaning | A2: crouching | A3: jumping | A4: laying |
| A5: riding | A6: running | A7: scooter | A8: sitting |
| A16: standing | A27: walking | – | – |
1.2 Modifier Level Actions (3)
| A8: sittingTogether | A17: standingTogether | A27: walkingTogether |
1.3 Aggregate Level Actions (24)
| A10: sittingWhileCalling | A11: sittingWhileDrinking | A12: sittingWhileEating | A13: sittingWhileHoldingBabyInArms |
| A14: sittingWhileTalkingTogether | A15: sittingWhileWatchingPhone | A18: standingWhileCalling | A19: standingWhileDrinking |
| A20: standingWhileEating | A21: standingWhileHoldingBabyInArms | A22: standingWhileHoldingCart | A23: standingWhileHoldingStroller |
| A24: standingWhileLookingAtShops | A25: standingWhileTalkingTogether | A26: standingWhileWatchingPhone | A29: walkingWhileCalling |
| A30: walkingWhileDrinking | A31: walkingWhileEating | A32: walkingWhileHoldingBabyInArms | A33: walkingWhileHoldingCart |
| A34: walkingWhileHoldingStroller | A35: walkingWhileLookingAtShops | A36: walkingWhileTalkingTogether | A37: walkingWhileWatchingPhone |
2. Size of Datasets
The dataset includes three types of files:
- RGB videos: collected RGB videos.
- 2-D skeletons + bounding boxes + labels: JSON format files including 2-D skeletons, bounding boxes and labels for each RGB video.
- pre-processed data: splitted into “training” (70%) and “test” (30%) data with format “.npy” for joint body data and “.pkl” for label data.
The size of each type is shown in the below table:
| Data Type | POLIMI-ITW-S |
| RGB videos | 335 GB |
| 2-D skeletons + bounding boxes + labels | 39.4 GB |
| pre-processed data (.npy and .pkl) | 17.7 GB |
| Total | 392.1 GB |
3. More Information (FAQs and Sample Codes)
We have developed the annotation tool which should be used to visualize poses, bounding boxes and labels on the video clips.
We provide the developed annotation tool, data pre-processing script, information about the data, answers to FAQs, samples codes to read the data, and the latest published results on our datasets here.
4. Samples

| RGB Clip A | RGB Clip B |
| Classified clip 1 | Classified clip 2 |
5. Terms & Conditions of Use
The datasets are released for academic research only, and are free to researchers from educational or research institutes for non-commercial purposes. The use of the dataset is governed by the following terms and conditions:
- Without the expressed permission of the AIRLab, any of the following will be considered illegal: redistribution, derivation or generation of a new dataset from this dataset, and commercial usage of any of these datasets in any way or form, either partially or in its entirety.
- For the sake of privacy, images of all subjects in any of these datasets are only allowed for the demonstration in academic publications and presentations.
- All users of “POLIMI-ITW-S” dataset agree to indemnify, defend and hold harmless, the AIRLab and its officers, employees, and agents, individually and collectively, from any and all losses, expenses, and damages.
6. How to Download Datasets

This dataset is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Users can submit the Request Form and accept the Release Agreement. We will validate your request and give you access to the dataset.
TEINVEIN


TEINVEIN (TEcnologie INnovative per VEicoli INtelligenti) is a project financed by Regione Lombardia for the construction of a platform for intelligent autonomous vehicles.
Contact: Matteo Matteucci
For additional details: https://www.deib.polimi.it/eng/news/details/683
i.Drive

i.Drive is an interdepartmental laboratory where AIRLab is the technology provider for robotics.
The laboratory aims at developing inter-disciplinary proficiency required for analysis and modelling of behavioral aspects due to the interaction between driver, vehicle, infrastructure, and environment through:
- A fixed structural component based on a virtual realty simulator aimed at the ex-ante test of expected behavioral models, the joined optimization of vehicle and road infrastructure, the increase of ex-post and in-itinere statistical significance ofexperiments carried out on roads;
- A mobile component based on an instrumented vehicle aimed at measuring on field performance and reactions of drivers in different driving conditions and at collecting environmental data to be reproduced ex-post by simulation.
Contact: Matteo Matteucci
For additional details: http://www.idrive.polimi.it/
Sprayin’ with Brain
Sprayin’ with Brain is a line of research projects dealing with applications of Artificial Intelligenge and Robotics to agriculture. Collaboration with external experts (such as researchers in agriculture) and interaction with manufacturers of agricultural machinery and farmers keeps Sprayin’ with Brain focused on real-world problems.
Contact: Matteo Matteucci
Semantic Mesh Labeling
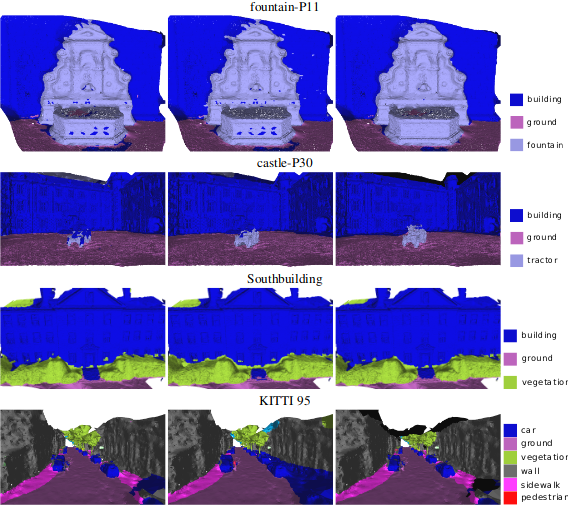
A project for visual 3D reconstruction, where an automatic pipeline models, incrementally, the scene acquired from the images. The pipeline adopts a manifold reconstruction from Structure from Motion point cloud method, a novel mesh merging algorithm and photometric surface evolution.
Subsequent evolution involves improvements to the Multi-View Stereo pipeline, from depth map estimation to mesh refinement by combining classical approaches, such as PatchMatch, with machine learning oriented method, such as geometric deep learning.
Contact: Matteo Matteucci
GRAPE

GRAPE (Ground Robot for vineyArd Monitoring and ProtEction) explores the use of autonomous robots as means for pesticide-free pest control in vineyards. An robot fitted with an arm and a dispenser of pheromone-coated devices has the task of navigating through the vineyard, find suitable target locations for the devices, and place them in place.
Contact: Matteo Matteucci
For additional details: http://www.echord.eu/grape.html