
Tools for research built by AIRLab.
RAWSEEDS

The RAWSEEDS project produced high-quality, well-documented multisensor datasets for SLAM, complete with ground truth.
Originally distributed via BitTorrent only, the datasets are now downloadable from this Dropbox repository.
RAWSEEDS datasets include indoor, outdoor and mixed robot trajectories.
Giulio Fontana, Matteo Matteucci, Domenico G Sorrenti. Rawseeds: Building a Benchmarking Toolkit for Autonomous Robotics. Methods and Experimental Techniques in Computer Engineering, pp. 55-68, Springer International Publishing, 2014. DOI: 10.1007/978-3-319-00272-9_4
Intelligent Vehicles

A collection of image sequences and odometric measurements for vehicle heading and lateral offset benchmarking.
Subdivided into four vehicle laps on two different racing circuits, data have been acquired at up to 100 fps, adopting three different driving styles and under diverse weather conditions. For each image, ground truth data are provided, in terms of heading and lateral offset from the centerline.
Images can be downloaded from this online repository.
Task-oriented grasp metrics for affordance estimation
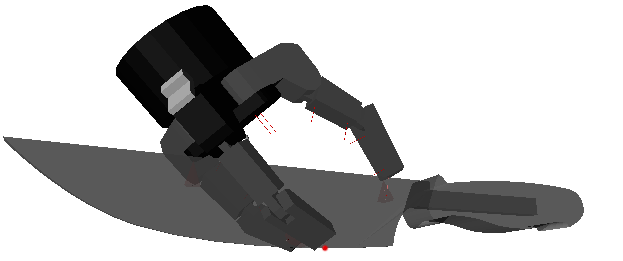
This dataset collects a set of physical metrics for task-oriented grasp affordance estimation, measured on 500 million simulated grasps. See the paper for details about each metric present in the dataset.
The dataset can be downloaded from this online repository.
SECI-GAN: Semantic and Edge Completion for Dynamic Objects Removal

Data used for the experimental evaluation of the SECI-GAN inpainting technique. These images can be used, in particular, to replicate the qualitative assessment done in human evaluation of the algorithm.
Data can be downloaded from this online repository.
POLIMI-ITW-S: In-The-Wild Shopping mall dataset.
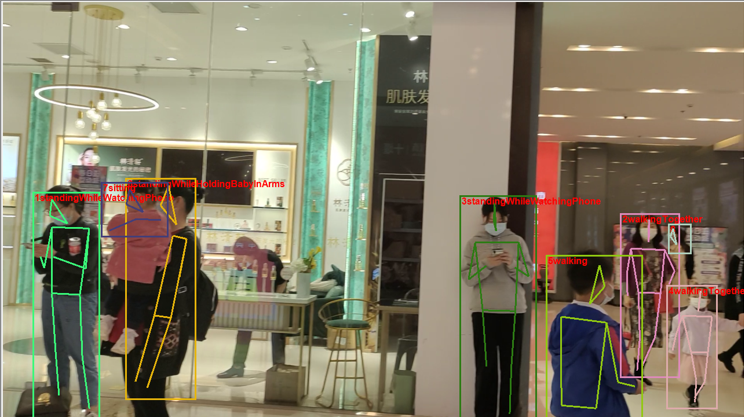
This dataset has been collected in shopping malls, and it is intended to support the development of algorithms able to perform activity recognition from movies taken by either a static and a mobile camera, at the typical height of a robot. People are behaving in their natural way. Actions have been labeled in a hierarchical way to support hierarchical identification.
Data can be downloaded from this page.